
Continuum Components Based Robotic Systems
It has long been envisioned that robots will become embedded with humans to help people accomplish a wide variety of tasks during their daily lives. However, despite the prevalence of existing robotic devices, few of them directly interact with humans. Most of them are poorly adaptable to the unpredictability that characterizes human activities, and furthermore are built from rigid components that can cause harm or injuries to humans in physical interactions. The vast majority of robots therefore operate on their own in a restricted space, usually with little or no interaction with human users. Soft and compliant robots, on the other hand, offer a fundamentally safe and user-friendly interface with humans given their inherently compliant nature, and therefore have the potential to be used as assistive devices to augment a broad range of human activities.
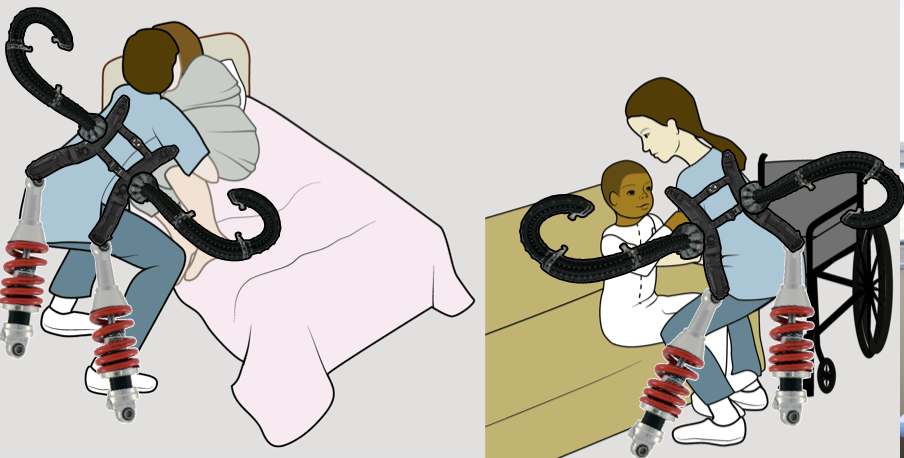
In this project, we propose a novel and rigorous human-centered framework for a class of soft robots, specifically continuum robots, to assist humans during various daily activities. The proposed robots will function as compliant auxiliary limbs and appendages in a wearable system to help their human users.
Conference Proceedings
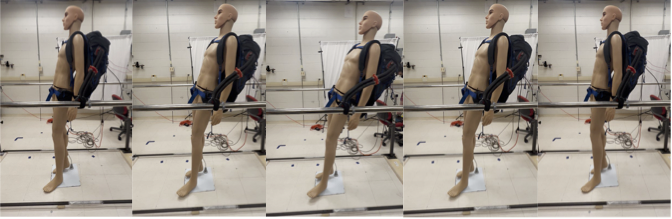
P. Malhotra, N. Kumar, C. Frazelle, I. Walker, and G. Lv, “Soft Robotics for Fall Mitigation: Preliminary Design and Evaluation of a Wearable System using Continuum Robots”, 2024 6th International Conference on Reconfigurable Mechanisms and Robots (ReMAR). PDF
G. Platt, I. Walker, and G. Lv, “Continuum-Legged Biped with a Kangaroo-Inspired Tail for Tripedal Locomotion: Preliminary Design and Validations”, 2026 International Conference on Cyborg and Bionic Systems (CBS). PDF
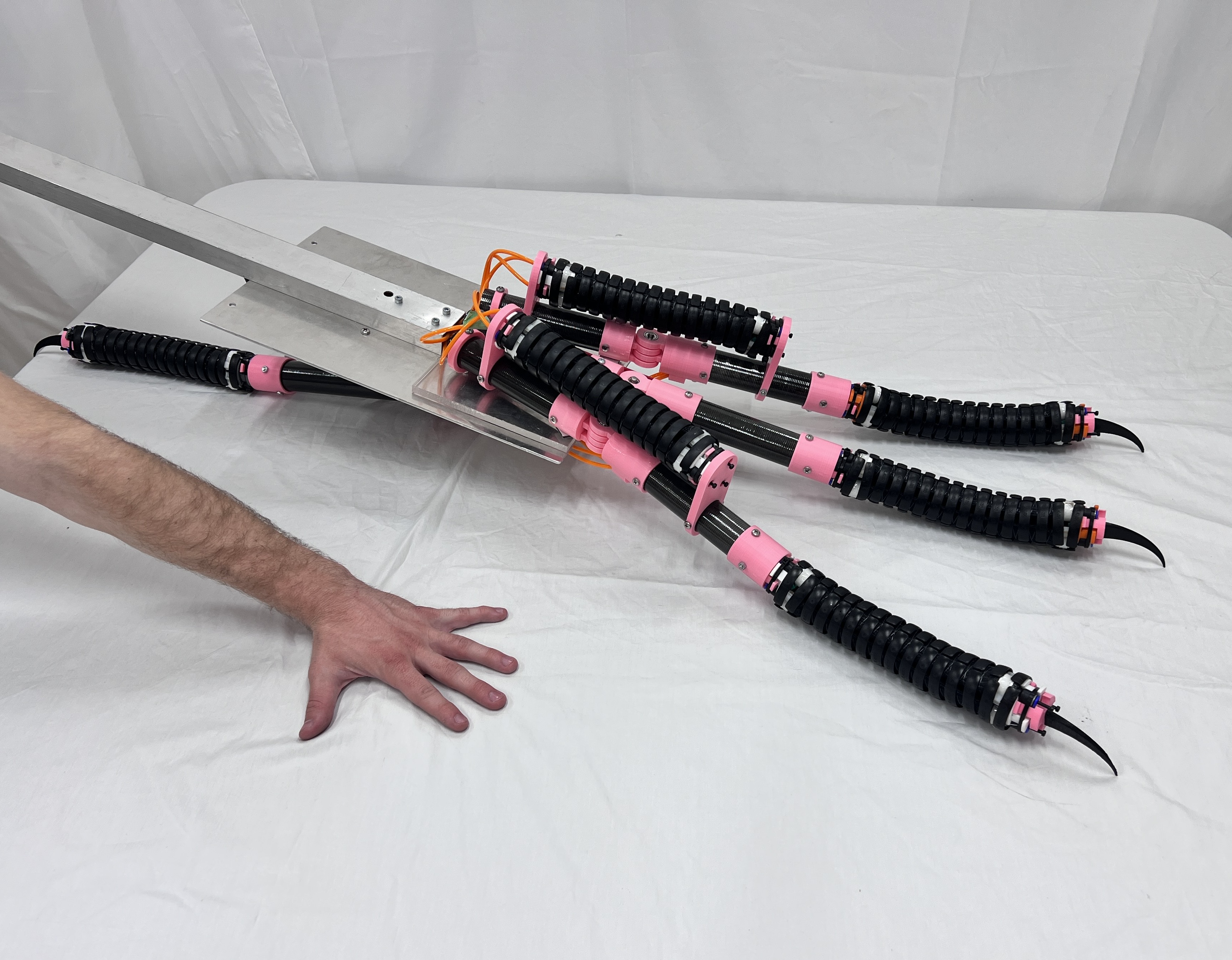
The robotics community has long sought to replicate the dexterity and versatility of human hands through compliant mechanisms. Soft robotic grippers, while highly dexterous, sacrifice repeatability and strength for versatility in various environments. Our paper introduces the Claw, a novel compliant robot gripper that stands out for its large size, bird-inspired design, and unique blend of continuum and rigid elements. By combining actuated rigid parts for strong grasps with compliant components for structural flexibility, the Claw achieves powerful grasping abilities across a wide range of objects, surpassing the limitations of current robotic hands.
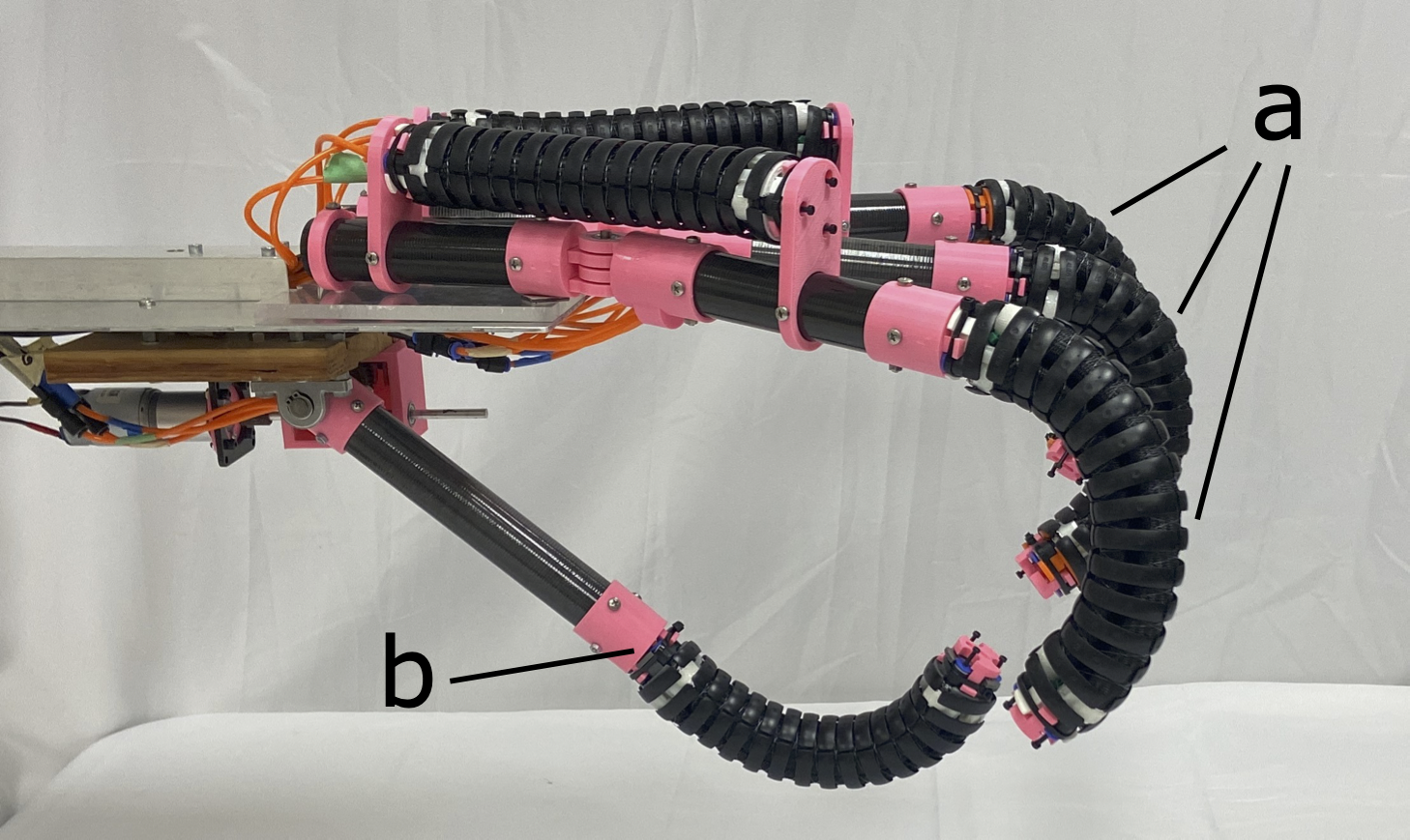
Unlike biomimetic designs, the Claw draws inspiration from bird feet without directly copying their anatomy. Instead, it aims to emulate the adaptability of avian limbs in a hybrid rigid/compliant structure. This approach, influenced by studies on avian anatomy for robotic grippers, particularly benefits applications like perching for unmanned aerial vehicles and climbing on vertical surfaces. The Claw's design, featuring three digits and an opposable digit, aligns with traditional robotic hand configurations.
Continuum robots, often inspired by cephalopods, leverage their compliant nature for whole-body grasping and manipulation. Taking cues from these concepts, we prototype the Claw using continuum, compliant segments actuated through a combination of direct motor and pneumatic methods. Through experiments, we demonstrate the Claw's adaptability and gentle grasping of large objects beyond typical robot gripper capabilities, while also identifying areas for further improvement in its hybrid design.
Conference Articles
- J. Mohrmann, J. Schuver, M. Yu, I. Walker, and G. Lv, “Teleoperation of a Compliant Avian-Inspired Robot Claw with Continuum Digits”, IEEE International Conference on Automation Science and Engineering, Los Angeles, CA, 2025. PDF
Journal Articles
- M. Stokes, J. Mohrmann, C. Frazelle, I. Walker, and G. Lv, “The Claw: An Avian-Inspired, Large Scale, Hybrid Rigid-Continuum Gripper”, Cover Article of Speicial Issue “Intelligent Bionic Robots” of Robotics (MDPI). PDF